publications
For an up-to-date list of publications, please visit my Google Scholar page.
2025
2025
-
 SICNav-Diffusion: Safe and Interactive Crowd Navigation with Diffusion Trajectory PredictionsSepehr Samavi, Anthony Lem , Fumiaki Sato , and 5 more authorsIEEE Robotics and Automation Letters (RA-L), in press, 2025
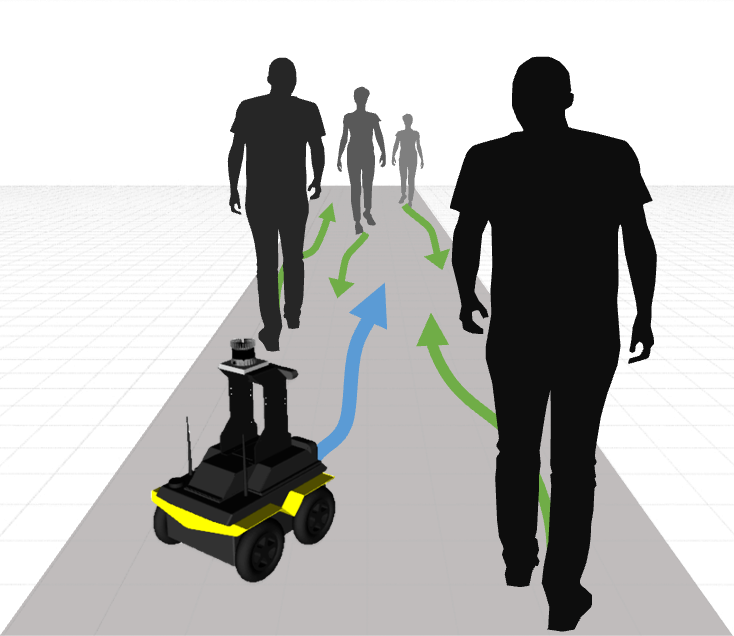
SICNav-Diffusion: Safe and Interactive Crowd Navigation with Diffusion Trajectory PredictionsSepehr Samavi, Anthony Lem , Fumiaki Sato , and 5 more authorsIEEE Robotics and Automation Letters (RA-L), in press, 2025To navigate crowds without collisions, robots must interact with humans by forecasting their future motion and reacting accordingly. While learning-based prediction models have shown success in generating likely human trajectory predictions, integrating these stochastic models into a robot controller presents several challenges. The controller needs to account for interactive coupling between planned robot motion and human predictions while ensuring both predictions and robot actions are safe (i.e. collision-free). To address these challenges, we present a receding horizon crowd navigation method for single-robot multi-human environments. We first propose a diffusion model to generate joint trajectory predictions for all humans in the scene. We then incorporate these multi-modal predictions into a SICNav Bilevel MPC problem that simultaneously solves for a robot plan (upper-level) and acts as a safety filter to refine the predictions for non-collision (lower-level). Combining planning and prediction refinement into one bilevel problem ensures that the robot plan and human predictions are coupled. We validate the open-loop trajectory prediction performance of our diffusion model on the commonly used ETH/UCY benchmark and evaluate the closed-loop performance of our robot navigation method in simulation and extensive real-robot experiments demonstrating safe, efficient, and reactive robot motion.
@article{samavi2025sicnavdiffusion, author = {Samavi, Sepehr and Lem, Anthony and Sato, Fumiaki and Chen, Sirui and Gu, Qiao and Yano, Keijiro and Schoellig, Angela P. and Shkurti, Florian}, journal = {IEEE Robotics and Automation Letters (RA-L), in press}, title = {SICNav-Diffusion: Safe and Interactive Crowd Navigation with Diffusion Trajectory Predictions}, year = {2025}, volume = {}, number = {}, pages = {}, }

2024
2024
-
 SICNav: Safe and Interactive Crowd Navigation using Model Predictive Control and Bilevel OptimizationSepehr Samavi, James R. Han , Florian Shkurti , and 1 more authorIEEE Transactions on Robotics (T-RO), 2024
SICNav: Safe and Interactive Crowd Navigation using Model Predictive Control and Bilevel OptimizationSepehr Samavi, James R. Han , Florian Shkurti , and 1 more authorIEEE Transactions on Robotics (T-RO), 2024Robots need to predict and react to human motions to navigate through a crowd without collisions. Many existing methods decouple prediction from planning, which does not account for the interaction between robot and human motions and can lead to the robot getting stuck. We propose SICNav, a Model Predictive Control (MPC) method that jointly solves for robot motion and predicted crowd motion in closed-loop. We model each human in the crowd to be following an Optimal Reciprocal Collision Avoidance (ORCA) scheme and embed that model as a constraint in the robot’s local planner, resulting in a bilevel nonlinear MPC optimization problem. We use a KKT-reformulation to cast the bilevel problem as a single level and use a nonlinear solver to optimize. Our MPC method can influence pedestrian motion while explicitly satisfying safety constraints in a single-robot multi-human environment. We analyze the performance of SICNav in two simulation environments and indoor experiments with a real robot to demonstrate safe robot motion that can influence the surrounding humans. We also validate the trajectory forecasting performance of ORCA on a human trajectory dataset.
@article{samavi2024sicnav, author = {Samavi, Sepehr and Han, James R. and Shkurti, Florian and Schoellig, Angela P.}, journal = {IEEE Transactions on Robotics (T-RO)}, title = {SICNav: Safe and Interactive Crowd Navigation using Model Predictive Control and Bilevel Optimization}, year = {2024}, volume = {41}, number = {}, pages = {801-818}, doi = {10.1109/TRO.2024.3484634}, url = {https://arxiv.org/abs/2310.10982}, }

2023
2023
- Does Unpredictability Influence Driving Behavior?Sepehr Samavi, Florian Shkurti , and Angela P. SchoelligIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2023
In this paper we investigate the effect of the unpredictability of surrounding cars on an ego-car performing a driving maneuver. We use Maximum Entropy Inverse Reinforcement Learning to model reward functions for an ego-car conducting a lane change in a highway setting. We define a new feature based on the unpredictability of surrounding cars and use it in the reward function. We learn two reward functions from human data: a baseline and one that incorporates our defined unpredictability feature, then compare their performance with a quantitative and qualitative evaluation. Our evaluation demonstrates that incorporating the unpredictability feature leads to a better fit of human-generated test data. These results encourage further investigation of the effect of unpredictability on driving behavior.
@inproceedings{Samavi2023, author = {Samavi, Sepehr and Shkurti, Florian and Schoellig, Angela P.}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, keywords = {autonomous vehicle,autonomy system,computer vision,perception,self driving car}, title = {{Does Unpredictability Influence Driving Behavior?}}, year = {2023}, }
2020
2020
- Zeus: A system description of the two-time winner of the collegiate SAE AutoDrive competitionKeenan Burnett , Jingxing Qian , Xintong Du , and 14 more authorsJournal of Field Robotics, 2020
@article{Burnett2020, archiveprefix = {arXiv}, arxivid = {2004.08752}, author = {Burnett, Keenan and Qian, Jingxing and Du, Xintong and Liu, Linqiao and Yoon, David J. and Shen, Tianchang and Sun, Susan and Samavi, Sepehr and Sorocky, Michael J. and Bianchi, Mollie and Zhang, Kaicheng and Arkhangorodsky, Arkady and Sykora, Quinlan and Lu, Shichen and Huang, Yizhou and Schoellig, Angela P. and Barfoot, Timothy D.}, url = {https://doi.org/10.1002/rob.21958}, doi = {10.1002/rob.21958}, eprint = {2004.08752}, issn = {15564967}, journal = {Journal of Field Robotics}, keywords = {autonomous vehicle,autonomy system,computer vision,perception,self driving car}, volume = {1}, number = {28}, title = {{Zeus: A system description of the two-time winner of the collegiate SAE AutoDrive competition}}, year = {2020} }
2019
2019
- Building a Winning Self-Driving Car in Six MonthsKeenan Burnett , Andreas Schimpe , Sepehr Samavi, and 5 more authorsIn Proc. of the IEEE International Conference on Robotics and Automation (ICRA) , May 2019
@inproceedings{Burnett2018, archiveprefix = {arXiv}, arxivid = {1811.01273}, author = {Burnett, Keenan and Schimpe, Andreas and Samavi, Sepehr and Gridseth, Mona and Liu, Chengzhi Winston and Li, Qiyang and Kroeze, Zachary and Schoellig, Angela P.}, booktitle = {Proc. of the IEEE International Conference on Robotics and Automation (ICRA)}, doi = {10.1109/ICRA.2019.8794029}, eprint = {1811.01273}, isbn = {978-1-5386-6027-0}, month = may, pages = {9583--9589}, title = {{Building a Winning Self-Driving Car in Six Months}}, url = {https://doi.org/10.1109/ICRA.2019.8794029}, access = {true}, year = {2019} } - aUToTrack : A Lightweight Object Detection and Tracking System for the SAE AutoDrive ChallengeKeenan Burnett , Sepehr Samavi, Steven L. Waslander , and 2 more authorsIn Proc. of the International Conference on Computer and Robot Vision (CRV) , May 2019Best poster presentation award
@inproceedings{Burnett2019, author = {Burnett, Keenan and Samavi, Sepehr and Waslander, Steven L. and Barfoot, Timothy D. and Schoellig, Angela P.}, booktitle = {Proc. of the International Conference on Computer and Robot Vision (CRV)}, keywords = {-vision for autonomous vehicles,ception,object recognition and detection,real-time per-}, title = {{aUToTrack : A Lightweight Object Detection and Tracking System for the SAE AutoDrive Challenge}}, month = may, url = {https://doi.org/10.1109/CRV.2019.00036}, dataset = {https://www.autodrive.utoronto.ca/uoftped50}, year = {2019}, note = {\emph{Best poster presentation award}} }